

Generelle Bauhinweise
Hier geht es mit ein paar generellen Bauhinweisen weiter. Manch mögen sagen, daß hier nur Sachen stehen die Sie eh schon kennen, aber leider muß ich sagen daß im Zeitalter von Schauwaffeln und ARF leider viele Details beim Holzbau langsam aber sicher in Vergessenheit zu geraten scheinen.
|
|
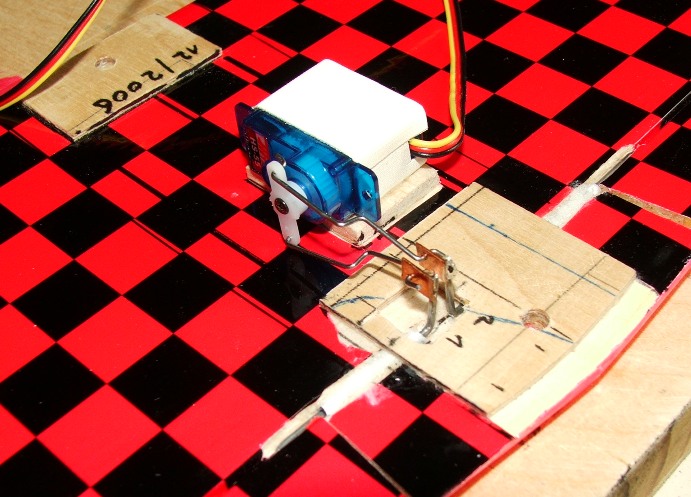
Nach dem Bespannen der Tragfläche mit ORASTICK oder ORACOVER Folie werden die Querruderanlenkungen eingebaut. Zuerst die Drähte biegen, dann diese mit Papier umwickeln
und die so entstandenen Röhrchen mit ein wenig Kleber fixieren. |
|
|
Hier die fertige Anlenkung. Das Servo mit mit Gewebeband umwickelt
und dann mit Sekundenkleber auf die Fläche geklebt (Bügelfolie
an der Klebestelle natürlich vorher entfernen) Die Anlenkung selber ist aus 1,2mm Stahldraht gebogen, die Laschen an der Anlenkung sind aus einem angelöteten Kupferblech Rund um die Löscher für die Verschraubung sind 1mm Sperrholzplättchen aufgeklebt, damit bei einer harten Landung nicht gleich die weiche Balsafläche zerstört wird, sondern die Plastikschrauben sauber abscheren können. Damit ist die Fläche fertig gebaut. |
|
Hinweise zum Rumpfbau:
|
Beim Bau des Rumpfes unbedingt auf die richtige EWD achten,
d.h. daß hier die Flächenauflage und die Auflage für
das Höhenleitwerk absolut parallel sind. |
|
|
|
|
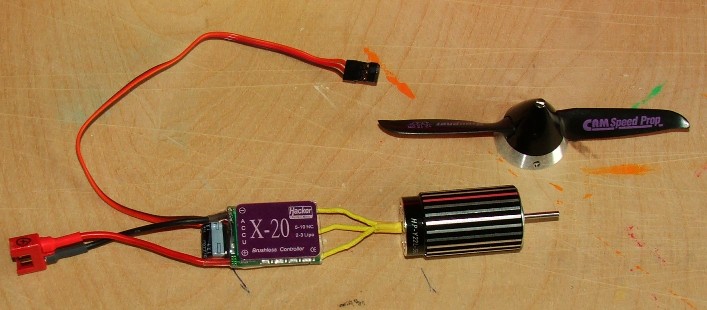
Antriebsstrang: |
Auf vielfachen Wunsch hier ein Bild des von mir verwendeten Antriebsstranges
mit Hacker-Regler und Hyperion-Motor. |
|
Antriebsvarianten für den SLIPSO 400 Hyperion Y22L-3600 mit 2zelligem LipoPack, Strom um 22A (Überlast!) Hacker B 20 15L mit 2zelligem LipoPack, Strom um 20A Mega 16/15/2 mit 2zelligem LipoPack, Strom um 30-33A (Überlast!) Alle Antriebe mit der Graupner 4,7x4,7 Cam Speed Prop gemessen |
Nebenstehend eine Sammlung verschiedener, erprobter Antriebsvarianten für den Slipso400 Der Hyperion Motor ist mit der 4,7*4,7 knapp überlastet, da er maximal 20A im Dauerbetrieb bekommen soll, daher besser auf eine 4,7*4,1 zurückgehen! |